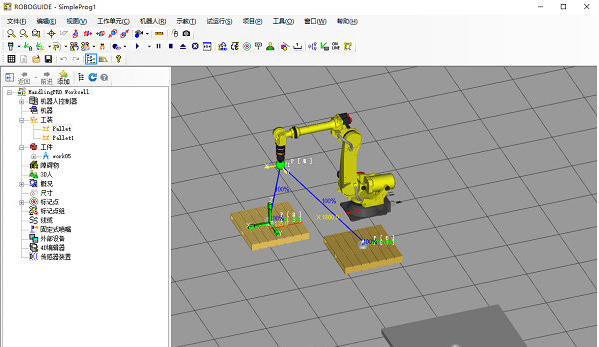
随着科技的发达,越来越多的智能机器设备可以取代人工服务,想要制作出智能机器人就需要专业的程序编写工程,今天小编为大家分享的ROBOGUIDE 软件就具备了这个功能,针对智能化的工业机器人打造,可以帮助用户更好地编写制作机器人的程序,有效提升编程的效率,非常强大。
1、HandlingPRO
HandlingPRO用于物料搬运应用,包括装载/卸载,包装,组装和物料搬运。HandlingPRO的功能包括CAD到路径编程,输送线跟踪,机器建模和编程。
2、PaintPRO
FANUC Robotics PaintPRO软件是离线编程解决方案的图形,可简化机器人的路径,示教和涂漆工艺开发。操作员通过以图形方式选择要喷涂的零件区域并在几种喷涂方法之间进行选择,来自动生成机器人程序。
3、ROBOGUIDE-PalletPRO和PalletTool
PalletPRO模拟软件可用于完全离线构建,调试和测试码垛应用程序。PalletPRO允许用户创建工作单元布局,进料和托盘站,衬纸和托盘分配器。使用PalletPRO的内置行业标准模式库,可以在3-D中创建并可视化数百个单位负载托盘配置。在PalletPRO中创建的数据可以下载到包含PalletTool®软件的真实机器人控制器中。
4、WeldPRO
WeldPRO模拟机器人电弧焊过程。WeldPRO CAD到路径编程功能支持自动生成具有定义的割炬角度和过程参数的多个机器人组协调的运动程序。可以将虚拟工作单元中的程序和设置转移到真实的机器人上,以减少安装时间。
关于Workcell布局教程
注意:关于对象
您可以将各种类型的对象添加到工作单元(例如,机器人,工具,障碍物,固定装置和零件)。
有关工作单元的更多详细信息,请参阅“关于工作单元”。
工作单元布局流程教程
本教程包括以下步骤。
步骤1:
创建一个新的工作单元,按照向导从开始屏幕创建一个新的工作单元。
第2步:
将夹具添加到工作单元中通过拖放从示例数据文件夹中添加夹具。
第三步:
将零件添加到工作单元中通过拖放从示例数据文件夹中添加零件。
步骤4:
添加目标将目标(可以任意设置的位置信息)设置到刀具中心点(TCP)的位置。
当您完成本教程时,将创建一个机器人移动零件的工作单元。
创建工作单元之前的屏幕
在开始本教程之前,请确保ROBOGUIDE处于以下状态。
ROBOGUIDE已启动。
仅显示开始屏幕。
步骤1:创建一个新的工作单元
ROBOGUIDE提供了一个向导来创建新的工作单元。
在此步骤中,您将使用“工作单元创建向导”设置以下项目。
处理
工作单元名称
机器人的各种设定
完成工作单元创建向导后,将创建一个虚拟机器人。
注意:关于虚拟机器人
虚拟机器人是在您的PC上运行的机器人,可以模拟实际的机器人,控制器和示教器。
创建一个新的工作单元
单击开始屏幕上的“新建单元格”按钮。
将出现“工作单元创建向导”。
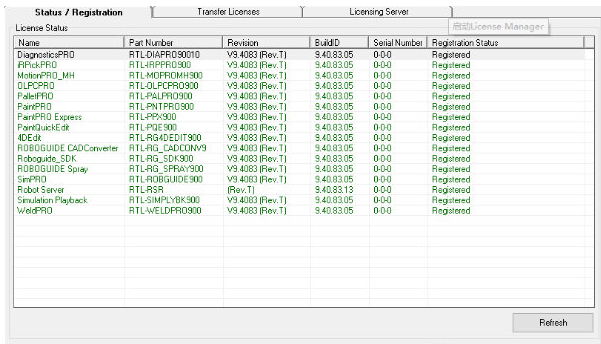
1,双击Setup.exe,选择程序安装目录、组件,安装软件
2,软件安装完成后,复制frlicensechecker.dll到软件安装目录下Shared\Utilities替换原文件
默认路径C:\Program Files (x86)\FANUC\Shared\Utilities
3, 安装激活完成,打开软件使用即可
软件很适合应用在智能机器人或者数控的领域中,可以让用户的程序编写工作更加高效,轻松完成机器人测试和仿真等操作,该版本经过破解后可以免费使用所有功能。
好了,今天的ROBOGUIDE分享就到这里了,想要下载更多软件就来软件站,快快收藏吧,更多精彩不容错过!
 下载
下载
Han 7.26MB / 小编简评:Han soft一维条码VCL组件包包括一系列组件,用来为 Delp
小编简评:Han soft一维条码VCL组件包包括一系列组件,用来为 Delp
 下载
下载
Kudaz 2.41MB / 小编简评:Kudaz 是一款免费且绿色免安装的程序编辑器,虽然一般使
小编简评:Kudaz 是一款免费且绿色免安装的程序编辑器,虽然一般使
 下载
下载
TortoiseSVN 35.86MB /
小编简评:TortoiseSVN是Subversion版本控制系统的一个免费开源
 下载
下载
PeStudio 1005.63KB /
小编简评:PeStudio是一款验证应用程序的免费工具,适用于开发者、
 下载
下载
Easy 2.73MB / 小编简评:一个简单好用的多功能网页制作工具,不需要任何HTML专业
小编简评:一个简单好用的多功能网页制作工具,不需要任何HTML专业
 下载
下载
APICloud 289.16MB /
小编简评:APICloud SDK是APICloud提供的完整的开发环境。包含AP
CopyRight © 2020-2025 www.zxian.cn All Right Reser 忠县软件园皖ICP备2023013640号-13 免责申明
声明: 本站所有手机app软件和文章来自互联网 如有异议 请与本站联系删除 本站为非赢利性网站 不接受任何赞助和广告网站地图

 DPS数据处理系统编程软件立即下载
DPS数据处理系统编程软件立即下载 x64dbg中文免安装版(程序逆向反汇编修改神器)编程软件立即下载
x64dbg中文免安装版(程序逆向反汇编修改神器)编程软件立即下载 ScriptCryptor编程软件立即下载
ScriptCryptor编程软件立即下载 orangeedit编程软件立即下载
orangeedit编程软件立即下载 SmartGit电脑版编程软件立即下载
SmartGit电脑版编程软件立即下载 Xoreax编程软件立即下载
Xoreax编程软件立即下载 NSIS(脚本安装系统)编程软件立即下载
NSIS(脚本安装系统)编程软件立即下载 Enigma编程软件立即下载
Enigma编程软件立即下载 Processing(编程设计软件)编程软件立即下载
Processing(编程设计软件)编程软件立即下载 LeadTools图像影像控件编程软件立即下载
LeadTools图像影像控件编程软件立即下载


















 搬砖铺路王手机版立即下载
搬砖铺路王手机版立即下载 小白数据恢复专家立即下载
小白数据恢复专家立即下载 卓创短讯立即下载
卓创短讯立即下载 宠物天国立即下载
宠物天国立即下载 首负模拟器花光50亿游戏立即下载
首负模拟器花光50亿游戏立即下载 七勇者与魔王之城立即下载
七勇者与魔王之城立即下载 飞跃摩托最新版立即下载
飞跃摩托最新版立即下载 健聊立即下载
健聊立即下载 喜马拉雅立即下载
喜马拉雅立即下载 单机双扣手机版立即下载
单机双扣手机版立即下载 超经典纸牌当空接龙手游合集,不容错过
超经典纸牌当空接龙手游合集,不容错过 驾驶飞机跨越星际,飞行类精品手游合集
驾驶飞机跨越星际,飞行类精品手游合集 嗡嗡轰鸣,机车摩托车竞速类手游合集
嗡嗡轰鸣,机车摩托车竞速类手游合集 谁能成为枪王?化身狙击手一击毙命
谁能成为枪王?化身狙击手一击毙命 精品王炸斗地主类手游合集,随时随地打牌
精品王炸斗地主类手游合集,随时随地打牌 足球FIFA类手游合集,踢出你的致胜一球
足球FIFA类手游合集,踢出你的致胜一球